第十四章:Ray tracing2 加速结构、辐射度量学
Ray Tracing 2
- 加速结构
- 辐射度量学
题外话:
GTC(GPU Technology Conference):
DLSS(Deep Learning Super Sampling)2.0 https://zhuanlan.zhihu.com/p/116211994
- 光栅化生成一个 1080p 的图,把它拉大成一张 4K 的图,结果不损失太多性能,同时看上去依然清晰
RTXGI(全局光照)https://developer.nvidia.com/rtxgi
回顾上节课:
为什么要做光线追踪
Whitted-style ray tracing(递归的光线追踪,光线弹射到多个地方,在每个交点计算着色和阴影)
光线和物体求交
- 光线和隐式表面求交
- 光线和三角形求交
AABB 包围盒
- 理解包围盒:坐标轴上三对相对的平板
- 光线和 AABB 盒求交
本节课:
AABB 盒怎么加速光线追踪?
- 均匀的网格(Uniform grids)
- 空间划分 (spatial partitions)
辐射度量学
AABB 加速光线追踪
均匀的网格:Uniform Spatial Partitions(Grids)
先让光线和盒子求交,再进一步和盒子里的物体求交
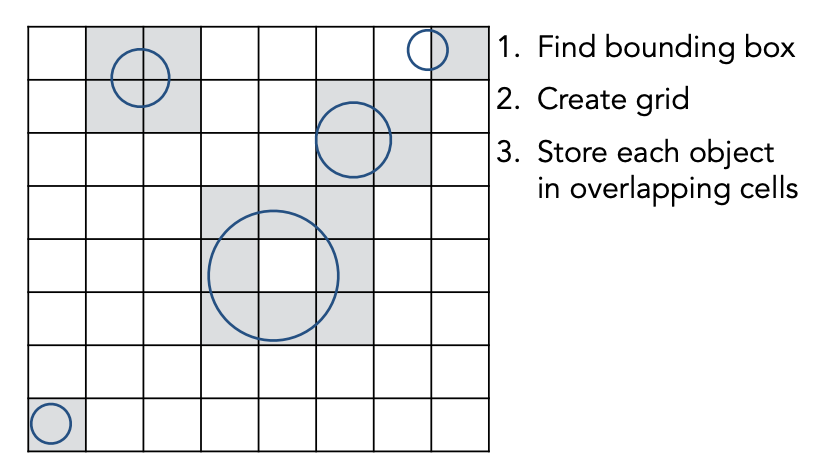
预处理:
1.先找到场景里的一个包围盒
2.把盒子分成一堆格子
3.标记与物体表面相交的格子
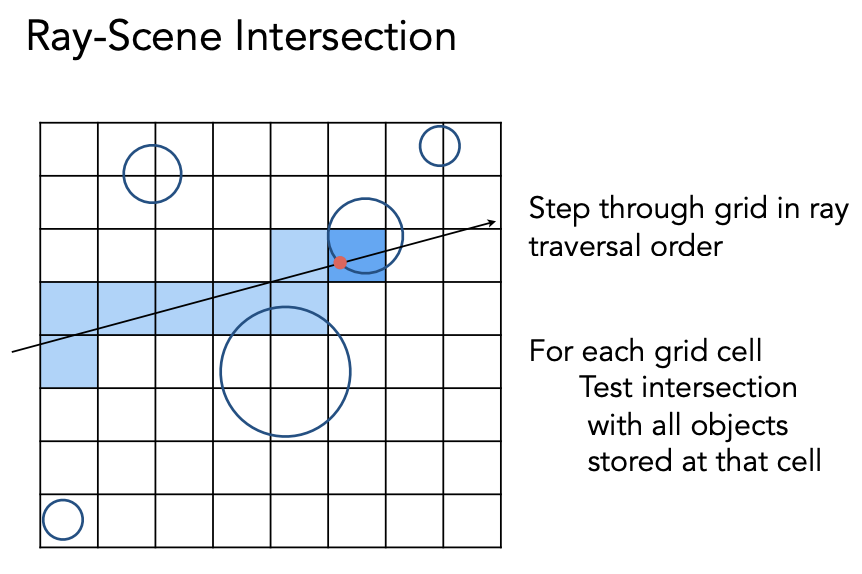
怎么判断光线继续往后传播时要和哪个盒子求交,不能每个格子都求一遍。有一个简单的思路是:如果光线往右上传播,就只看当前格子右边和上面的格子,判断光线与哪个格子有交点,再把光线移动一格。光栅化一条线:https://zhuanlan.zhihu.com/p/20213658。
加速效果:
一个格子(格子很稀疏),基本没有加速效果
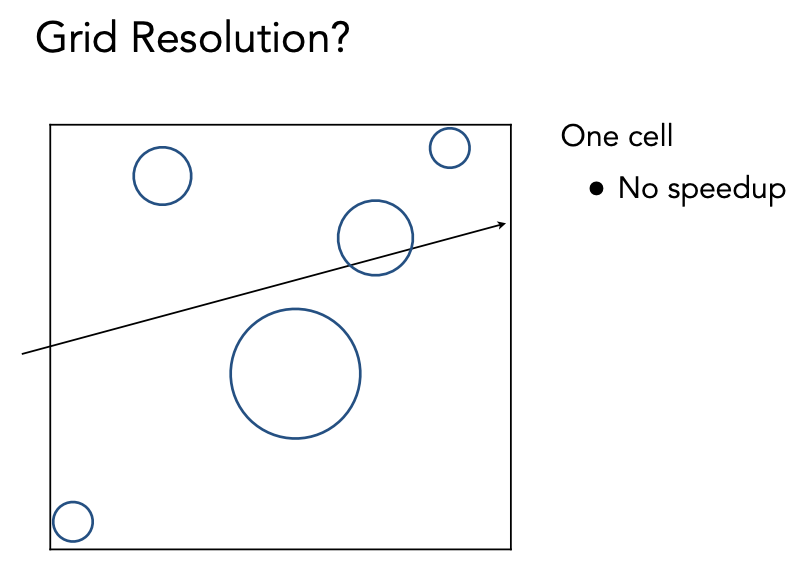
格子太密,要做很多次光线和格子的求交,效率很低
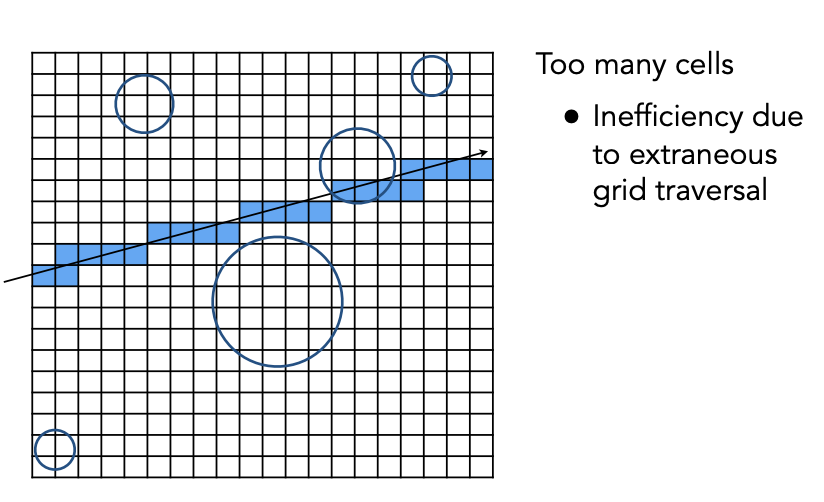
需要找一个平衡
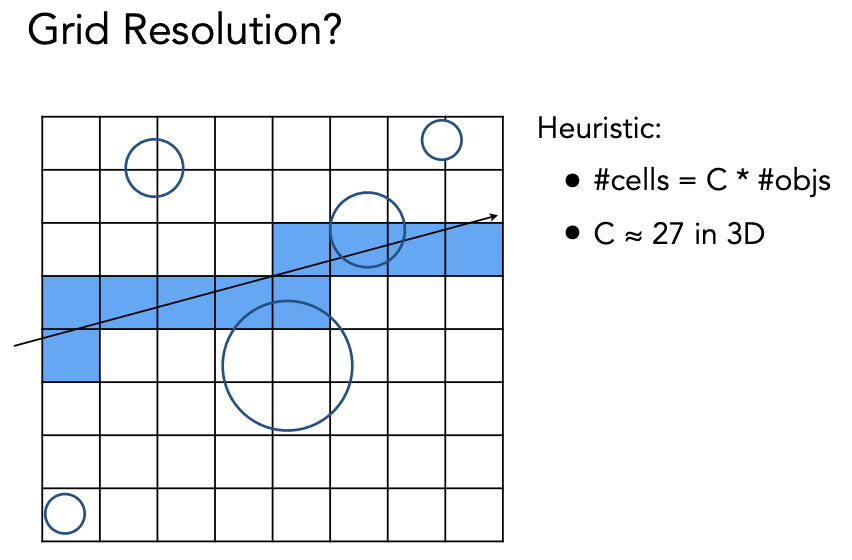
当几何物体在场景中分布比较均匀时,格子加速的效果比较好
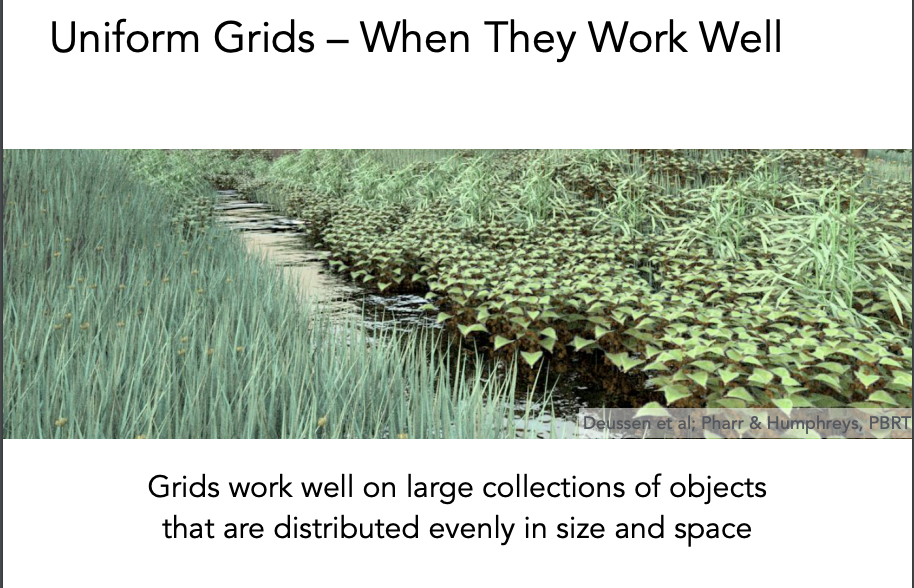
物体在场景中分布不均匀的时候,加速的效果不好

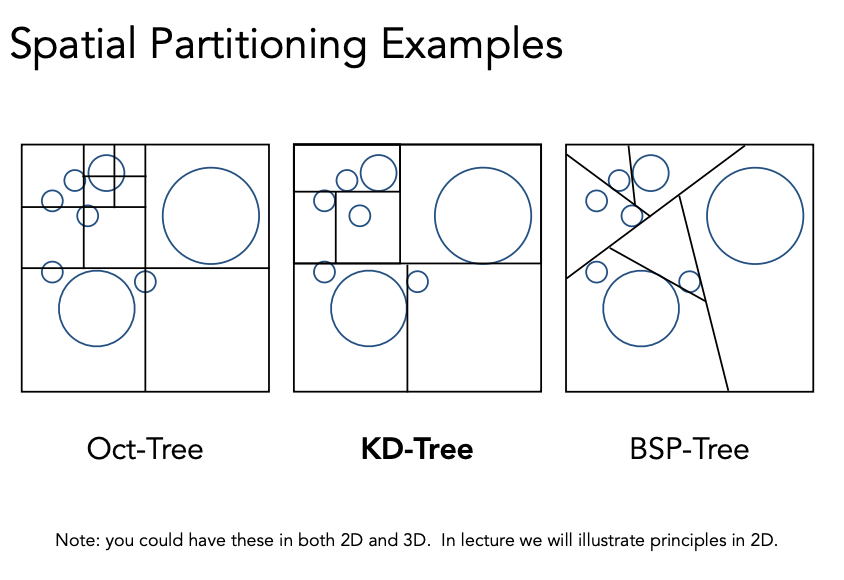
空间划分 Spatial Partitions
三种空间划分的结构:
Oct-Tree:8 叉树,把空间分成 8 个小方块,小方块继续分割,当格子里是空的,或物体足够少,就停止分割(平面是 4 叉树,即分成几份和维度有关系)
KD-Tree:2 叉树,每次一个格子只砍一刀(水平竖直沿着坐标轴交替划分,基本保证划分的空间是均匀的)
BSP-Tree:选一个方向砍一刀
KD-Tree 预处理,建立加速结构
把空间划分为二叉树:
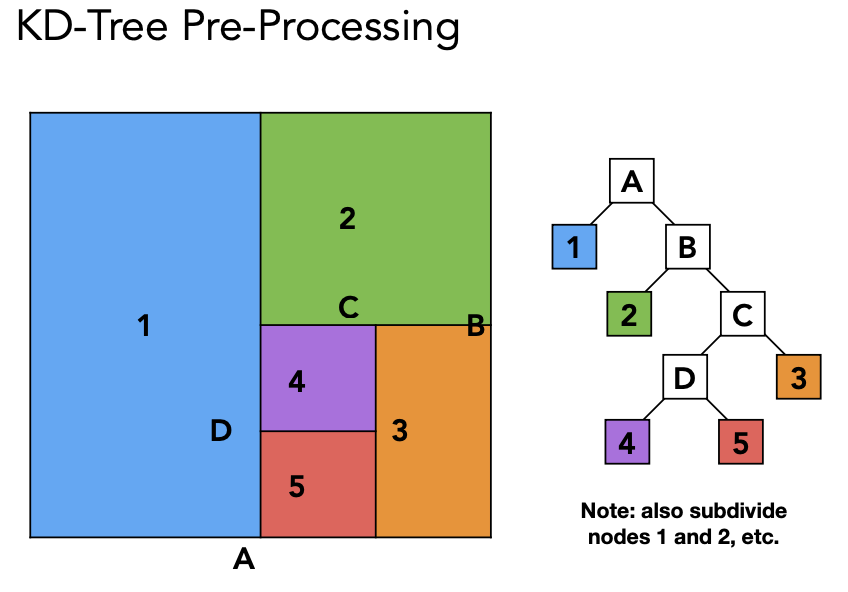
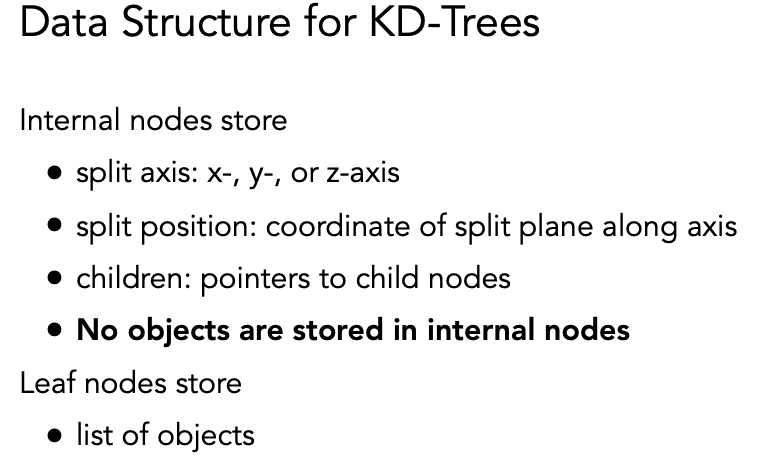
数据结构:
中间节点需要存储:
- 当前节点沿着哪个坐标轴划分
- 划分在哪个位置(不一定划分在中间)
- 2 个子节点
叶子节点需要存储:
- 和格子相交的几何物体
-
![image]()
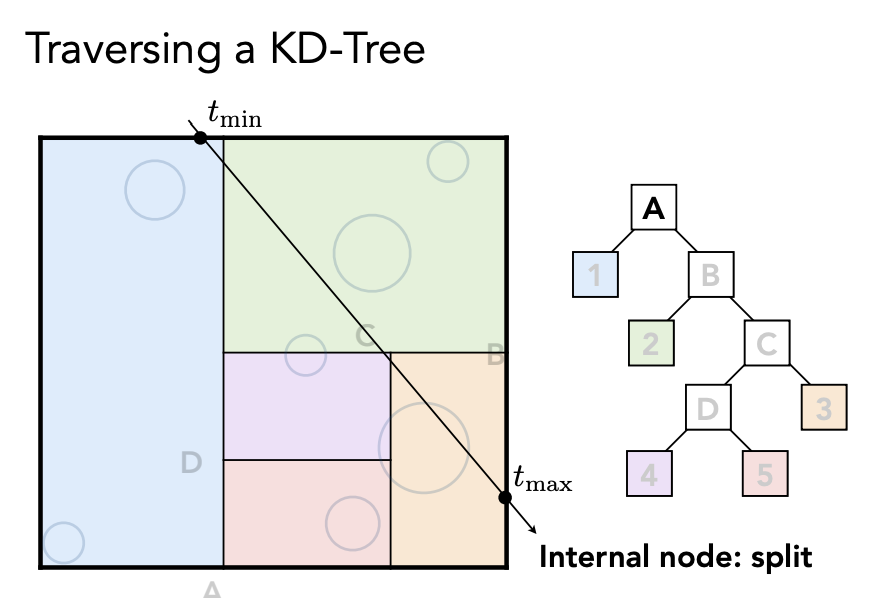
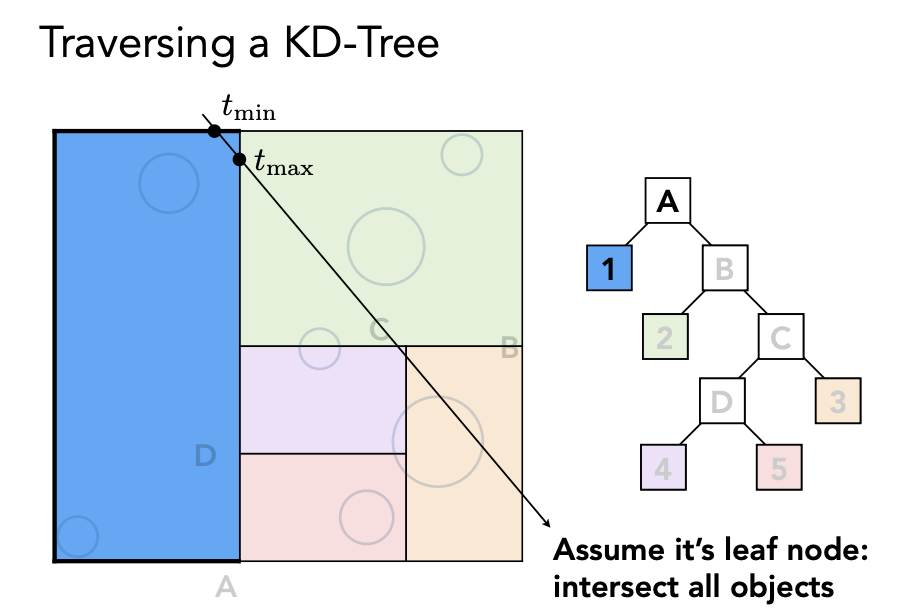
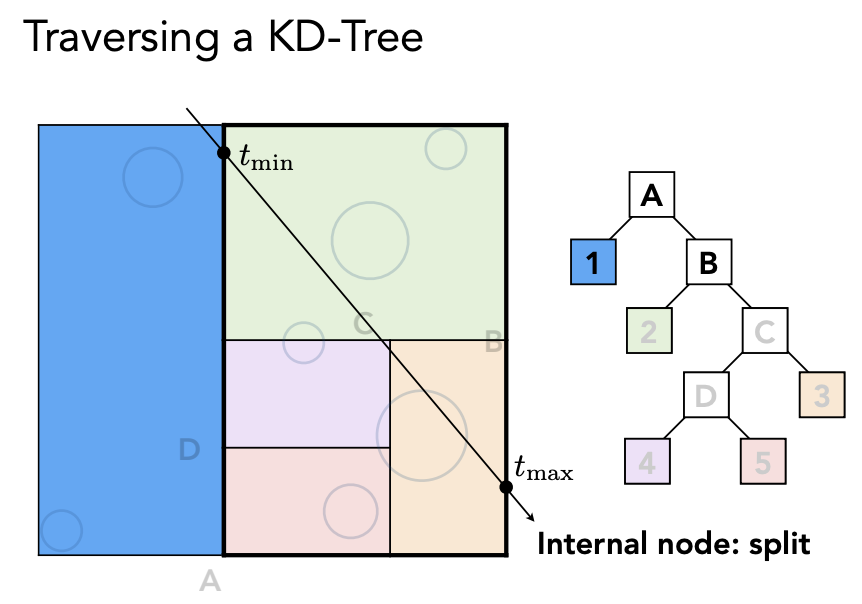
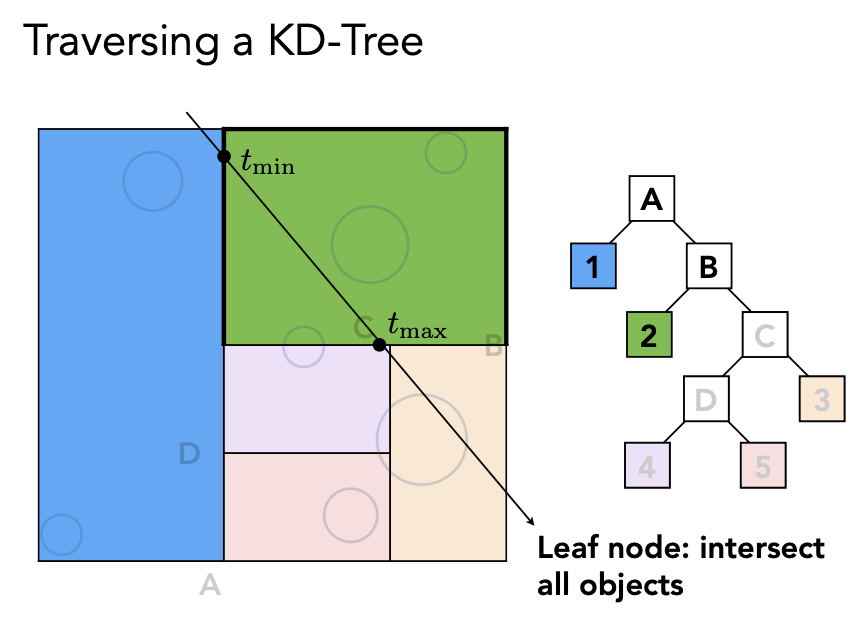
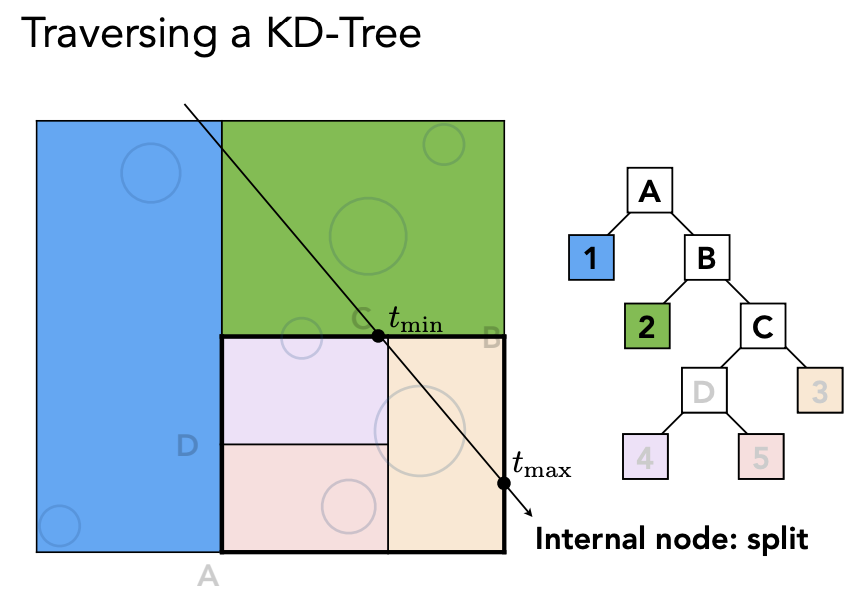
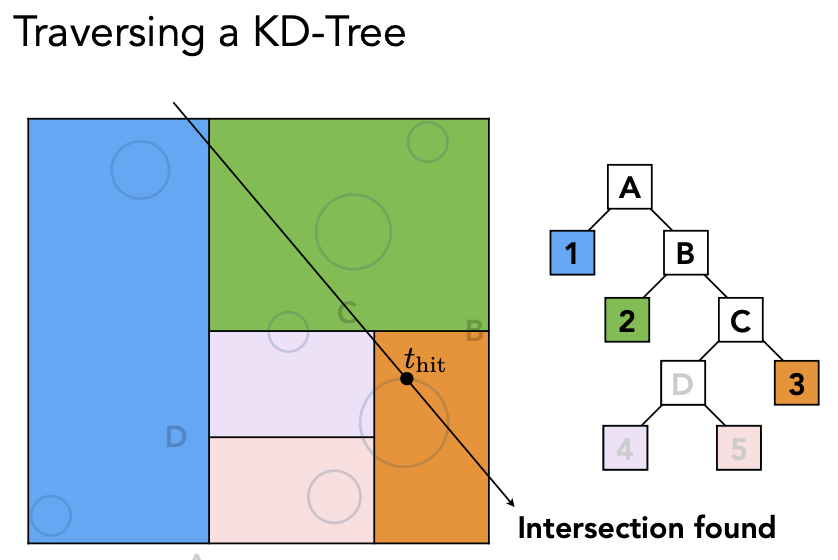
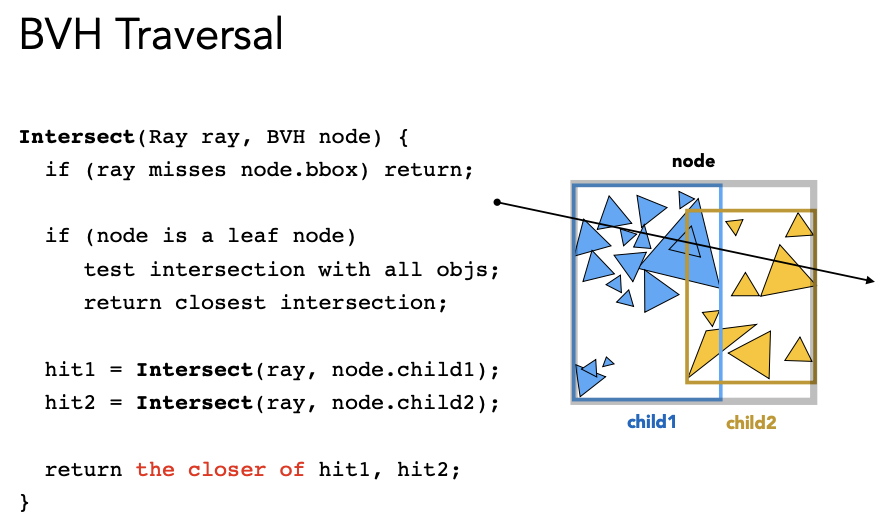
判断光线和当前节点是不是有交点,如果有交点,继续判断和当前节点的子节点是不是有交点,一直到叶子节点,如果光线和叶子节点有交点,就求光线和叶子节点里面所有物体的交点;如果光线和当前节点没有交点就不需要继续往下找。
如果是求最近的交点就一边找一边记录最近的。
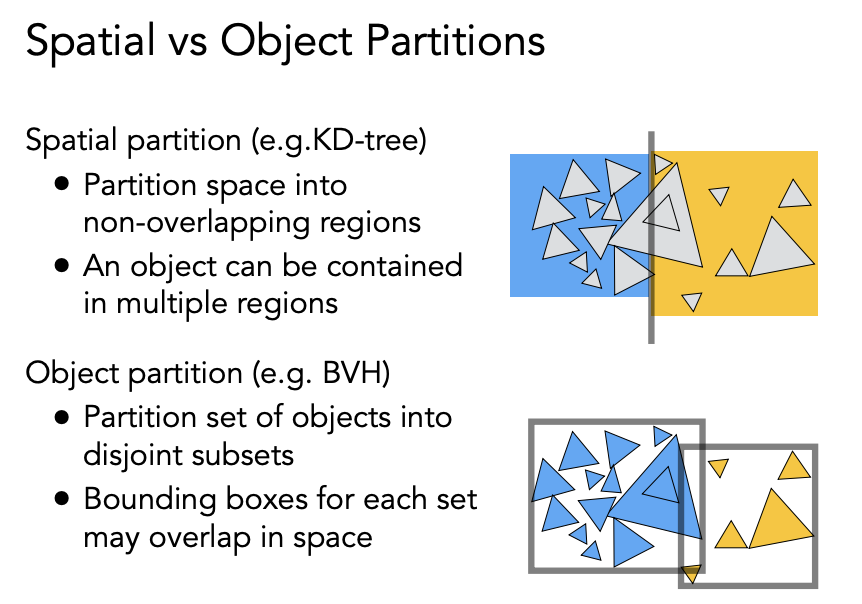
KD-Tree 的问题:
1.不好判断几何对象(三角形)和盒子是否有交集
2.1 个对象可能和不同的盒子都有交集,即同一个物体会被多个叶子节点存储
Object Partitions & Bounding Volumn Hierarchy(BVH)
划分物体:把一个盒子里的三角形分为两部分,把两部分的三角形再重新求包围盒,然后每个包围盒继续划分,直到一个包围盒里包含的节点数够少就停止划分。
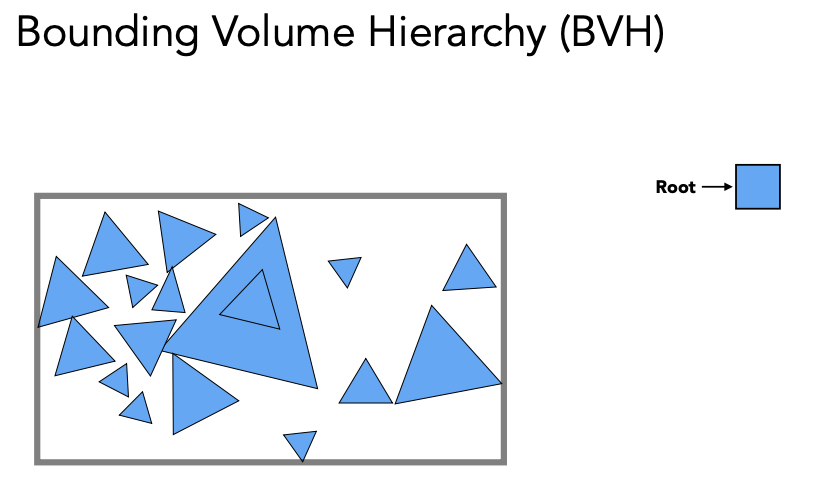
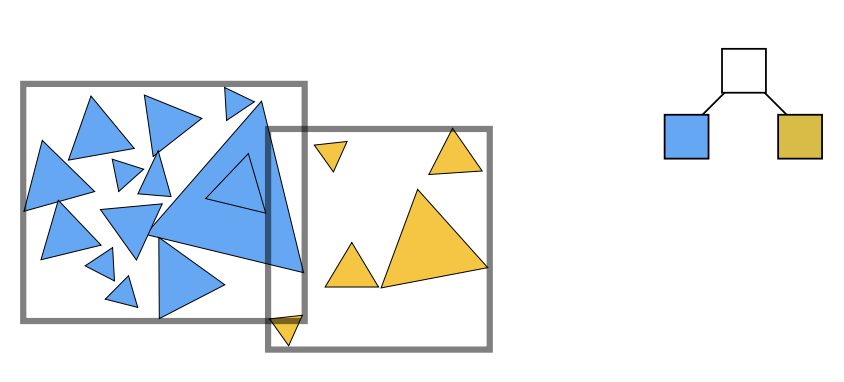
BVH 的好处是:一个物体只可能出现在一个盒子里,且无需求三角形和包围盒的交点,避免了 KD-Tree 的问题。
但 BVH 也有一个问题:BVH 对空间的划分不是很严格的划分开,BoundingBox 可以相交,所以需要在划分几何形体的时候尽量减少重叠。
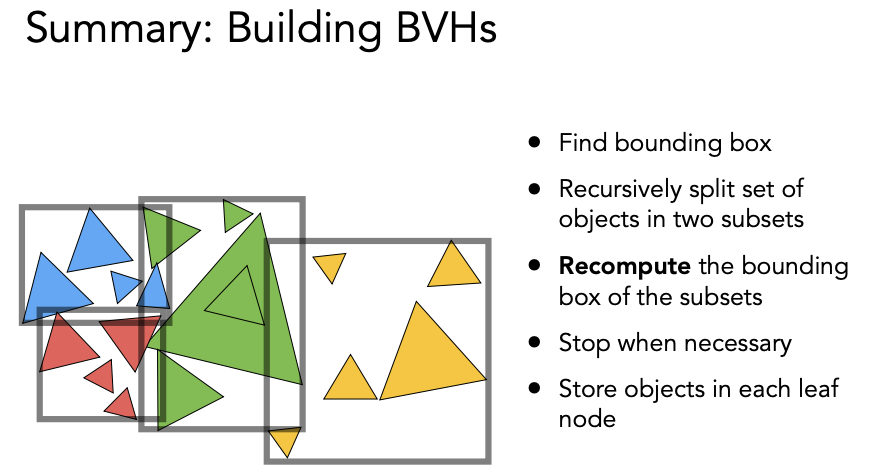
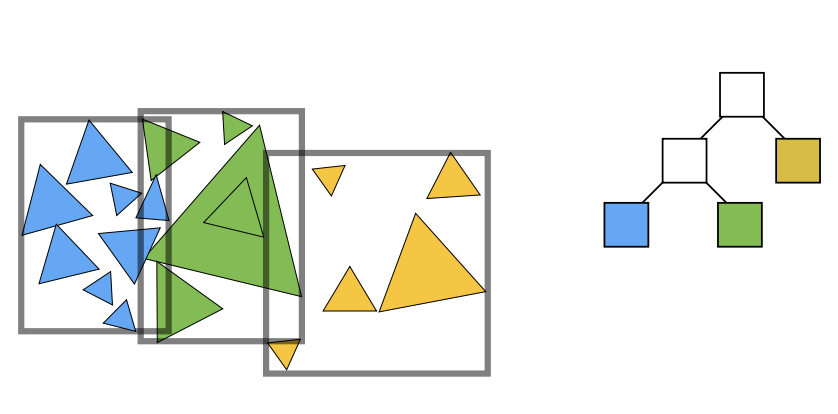
总结构造 BVH 加速结构的过程:
1.找到一个包围盒
2.递归地把包围盒中的物体拆成两部分
3.重新计算包围盒
4.当包围盒的物体足够少的时候停止递归
5.把物体信息存储在叶子节点里
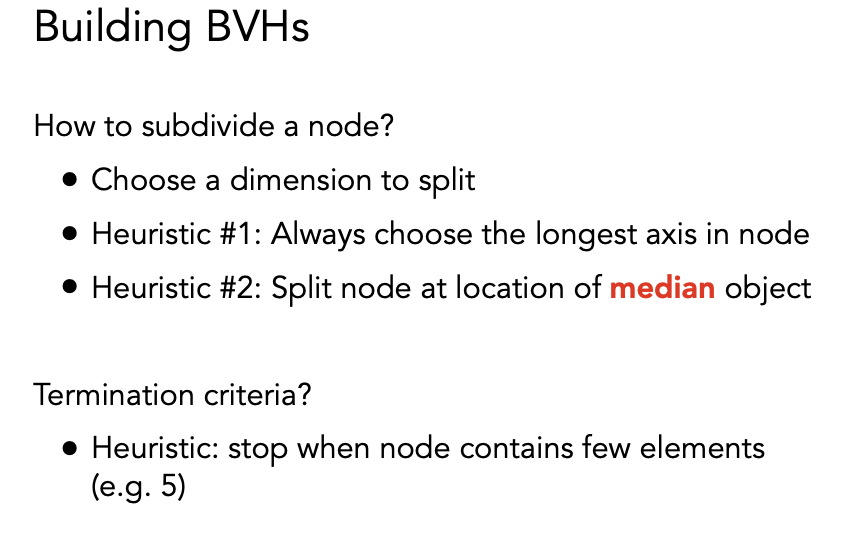
怎么做节点的划分?
选一个维度
方式 1:每次选一个最长的轴把节点分成两半,使得节点最后分布比较均匀
方式 2:取中间的三角形的位置把节点分为两半,是的分割后节点的三角形数量差不多,让这个树形结构两边保持平衡(深度小,平均搜索次数小)
- 取中间的三角形涉及到排序:所有三角形取重心,沿一个轴排个序,找到中间的那个三角形。(也可以不用排序找中位数,快速选择算法,可以达到 O(n)的时间复杂度)
如果场景是动态的,三角形数量会变化,就需要每次变化都重新算一下 BVH。
![image]()
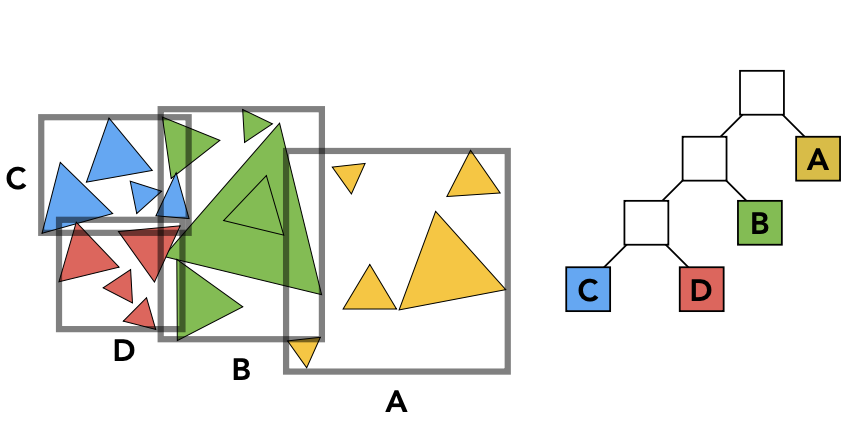
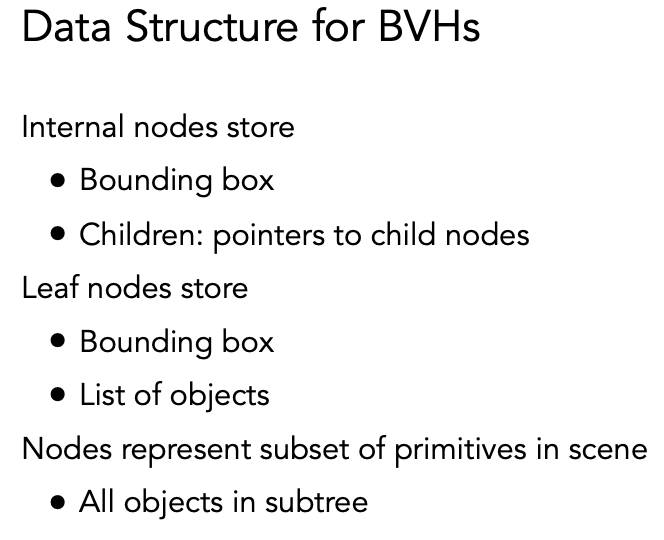
BVH 的数据结构:
中间节点存储:
- 包围盒
- 子节点的指针
叶子节点存储:
- 包围盒
- 实际的物体
-
![image]()
BVH 算法伪代码:
空间划分和物体划分的区别:
以上是 Whitted-style 光线追踪的内容。
辐射度量学 Basic radiometry
为什么要学习辐射度量学?
之间的 Blinn-Phong 模型里提到光的强度 I 是怎么得到的,他的物理意义是什么?
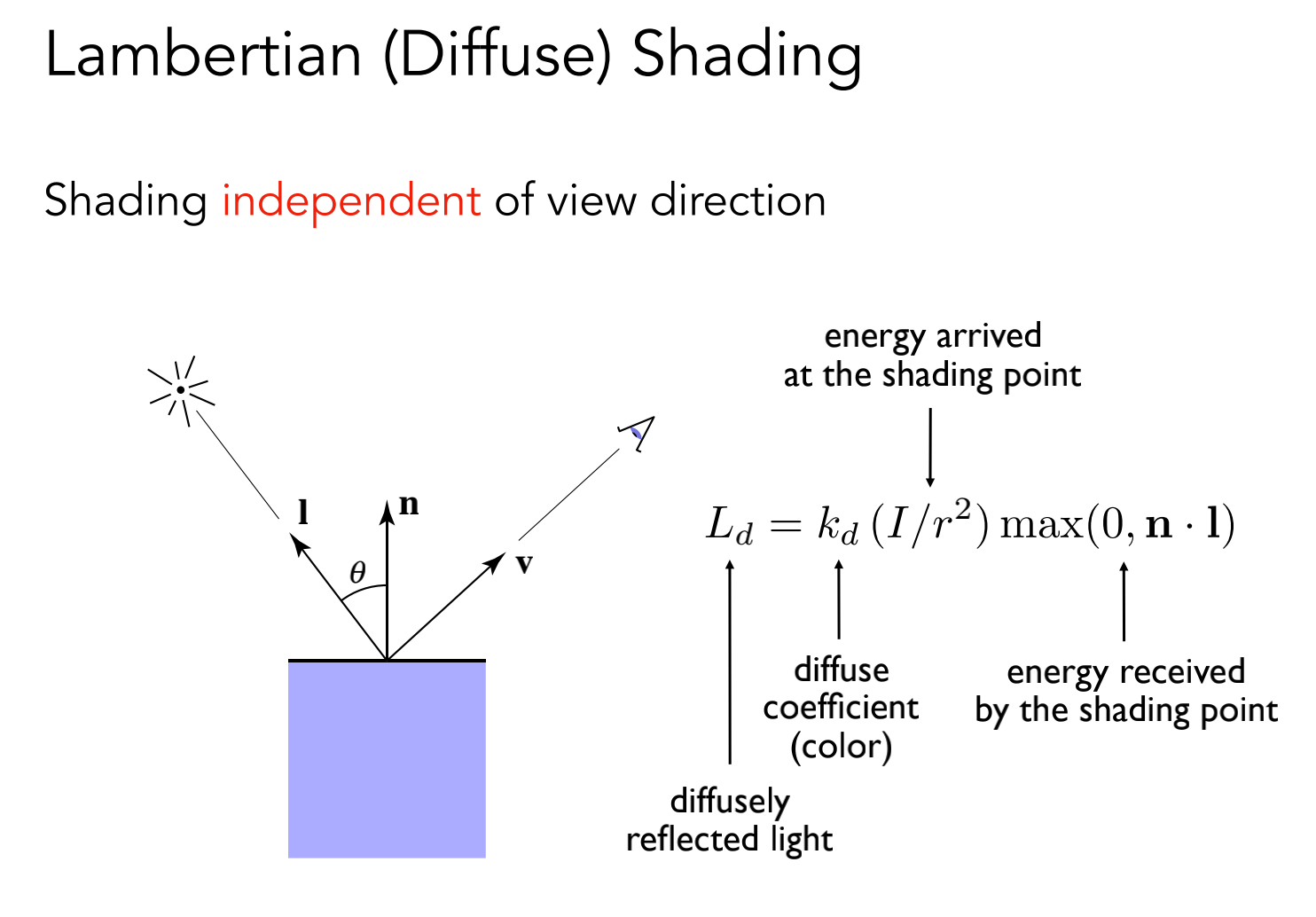
Whitted-style 光线追踪给的结果是正确的吗?
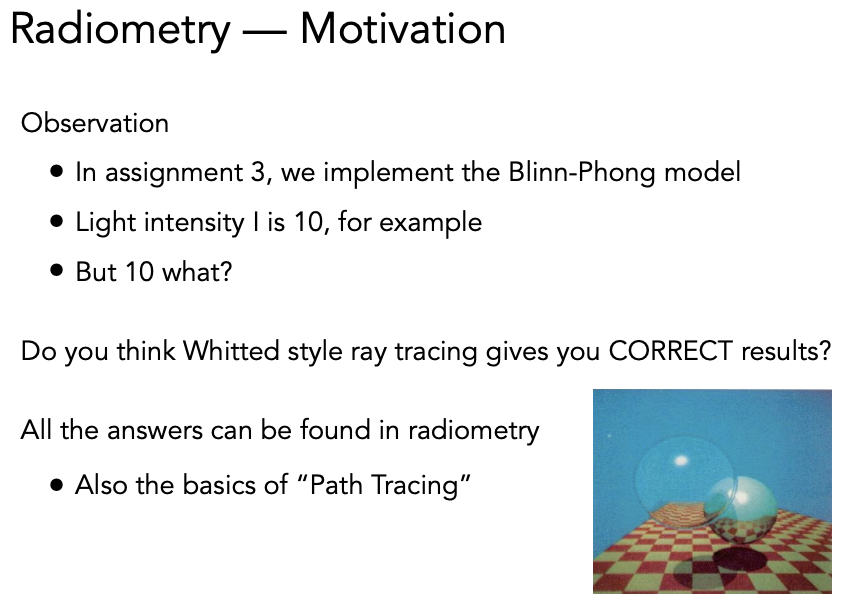
辐射度量学给了一种精准定义光照的物理量的方法。
辐射度量学学习的内容:
为如何描述光照定义了一系列的方法和单位
给光定义了各种空间中的属性(仍然是基于几何光学,认为光线沿直线传播):
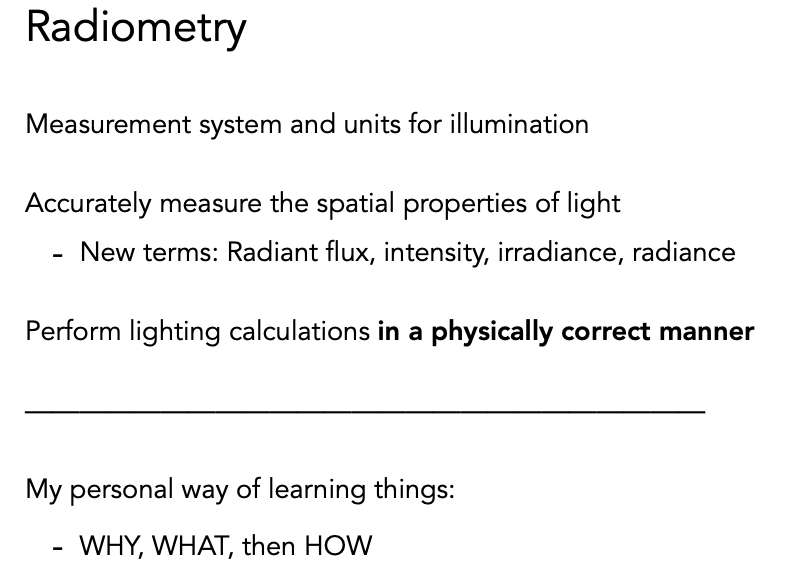
- Radiant flux,intensity,irradiance,radiance
Radiant Energy and Flux
Radiant energy 是电磁辐射的能量,单位是焦耳,用符号 Q 表示。
Radiant Flux 是单位时间的能量。
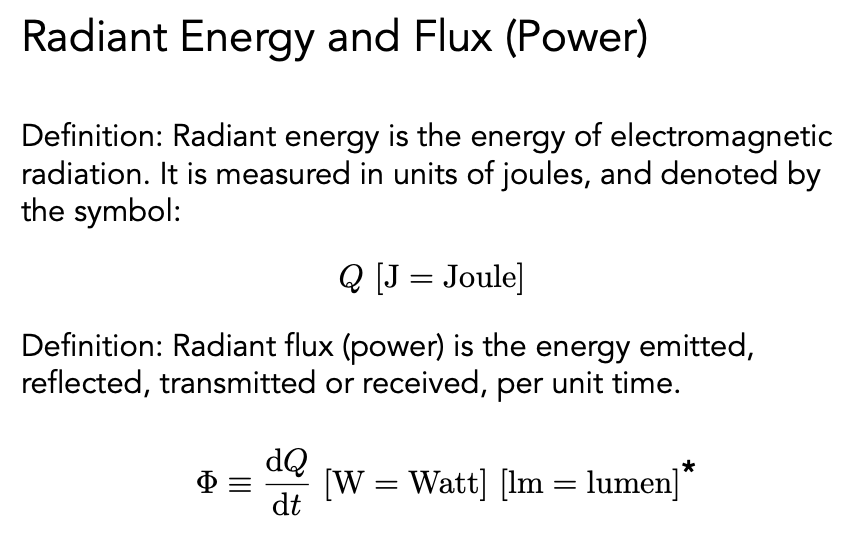
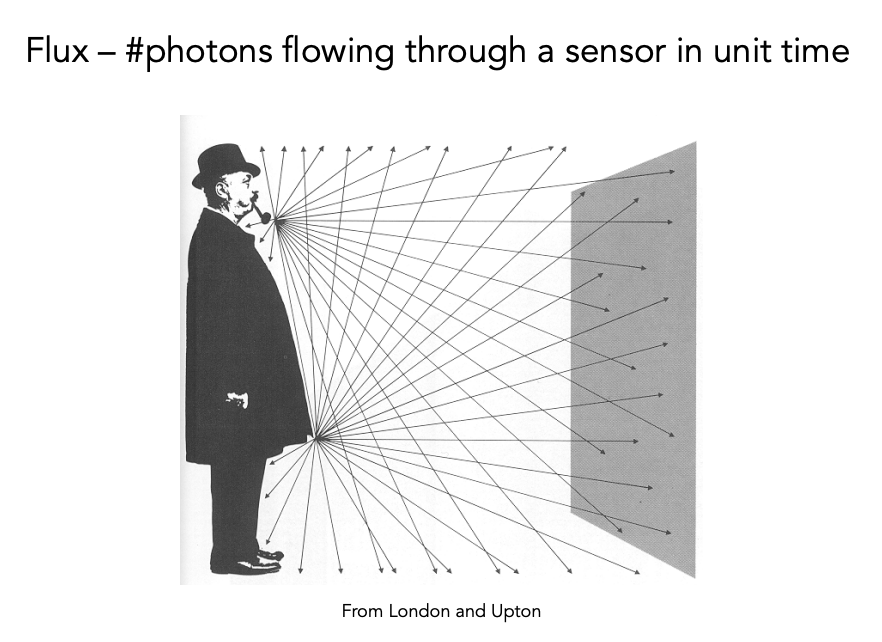
另一种理解:单位时间通过感光平面的光子的数量
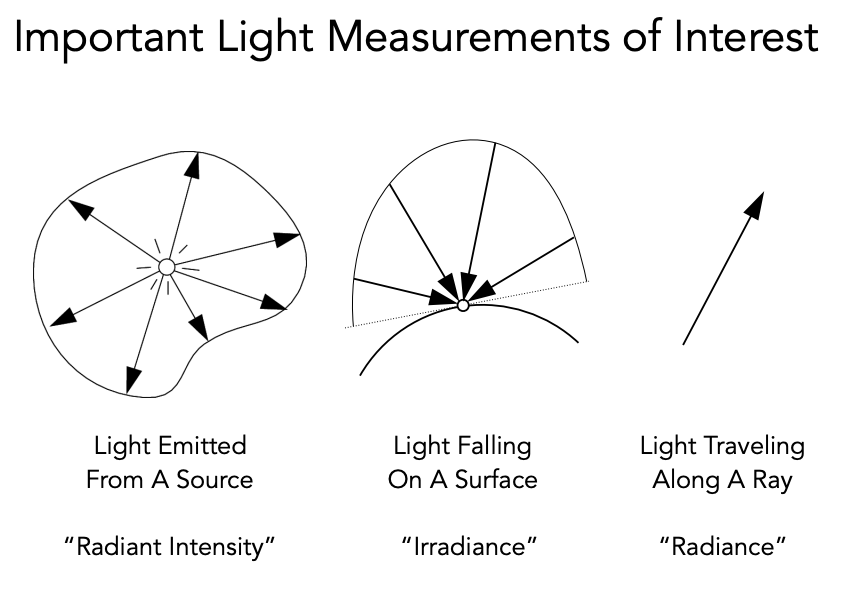
光源辐射的能量:radiant Intensity,定义了方向性和能量相关的概念
物体表面接受到了多少能量:Irradiance
光线传播中的能量怎么度量:Radiance
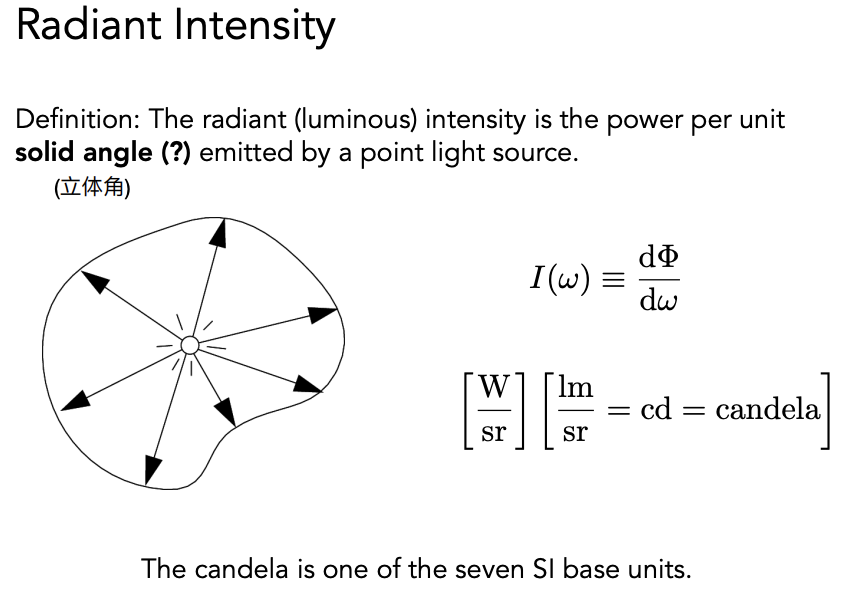
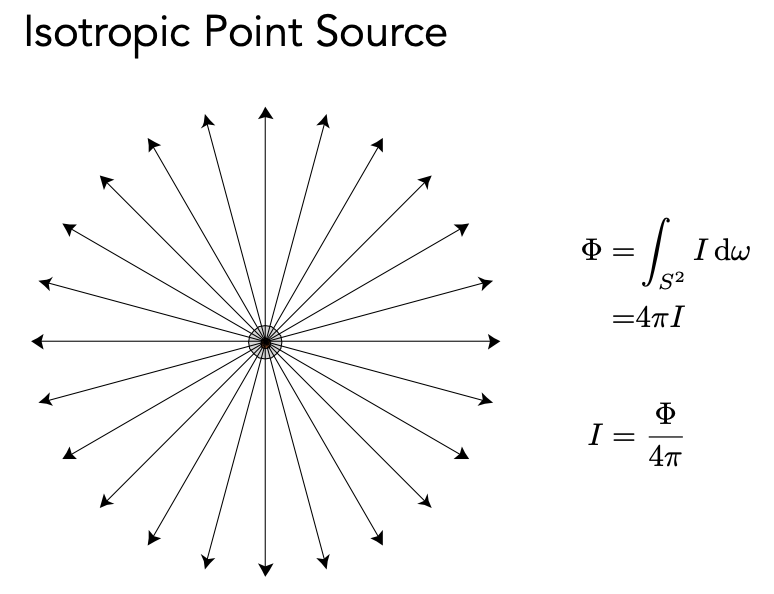
Radiant Intensity
单位立体角上点光源辐射出的单位能量
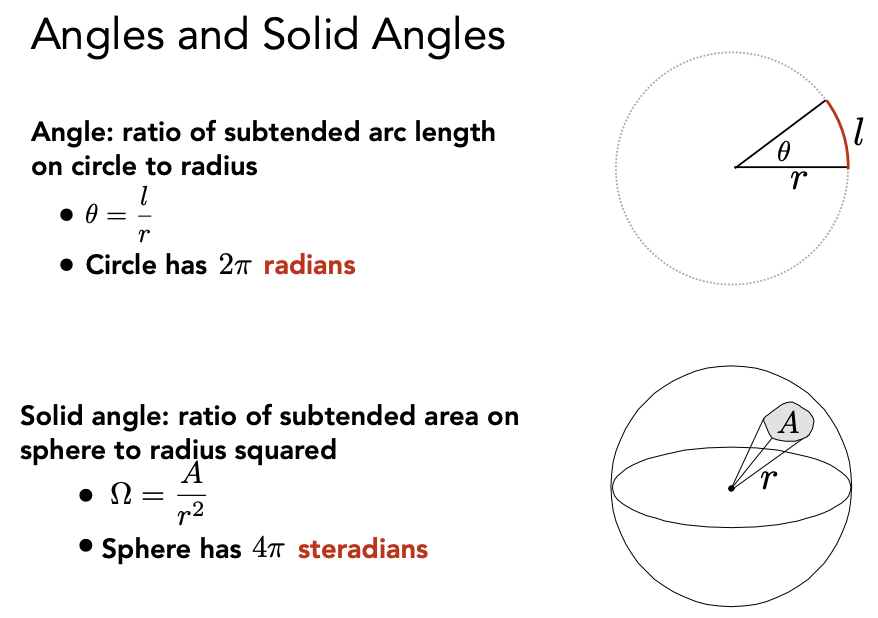
立体角:
角度:弧长/半径
立体角:角度在三维的延伸。锥体对应的面积/求面的面积。
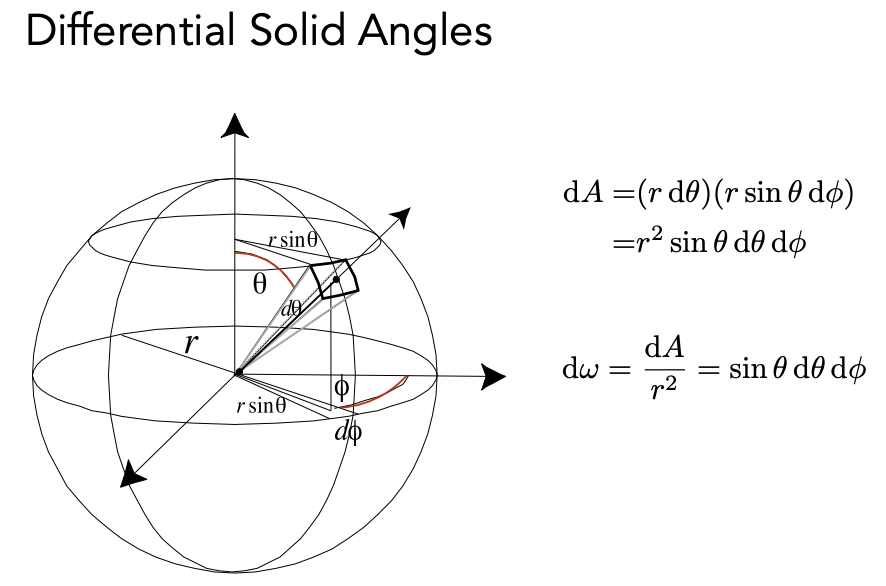
单位立体角(微分立体角)
对单位立体角做积分可以得到整个球面
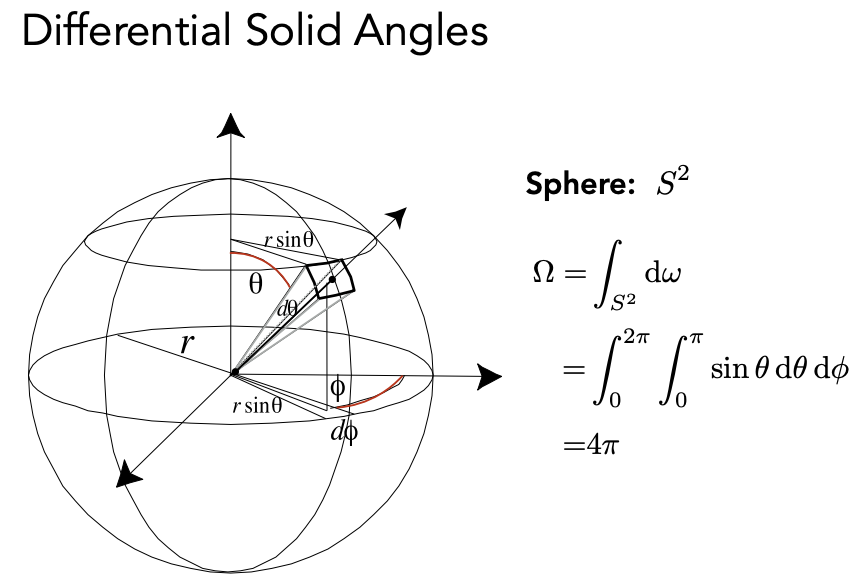
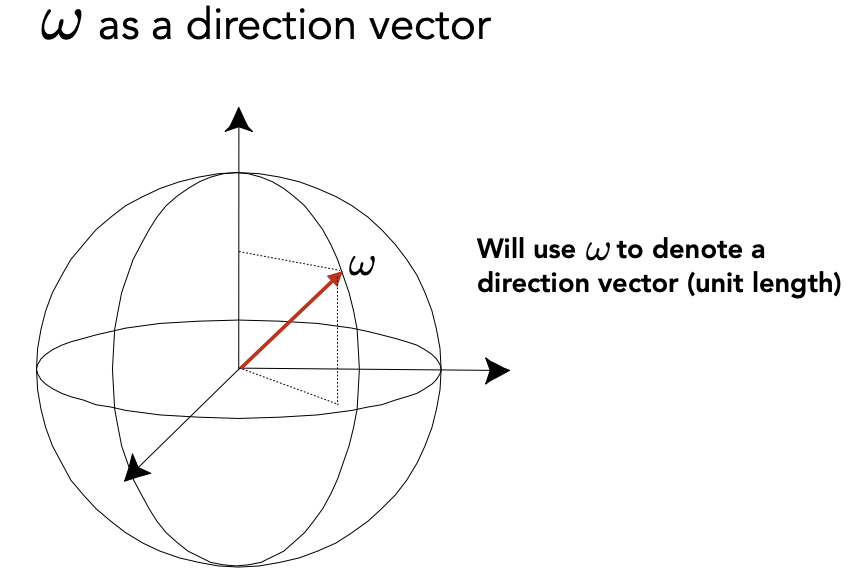
在辐射度量里面通常用 ω 表示方向,ω 可以用 θ 和 φ 来定义位置,并通过 sinθdθdφ 算出单位立体角。
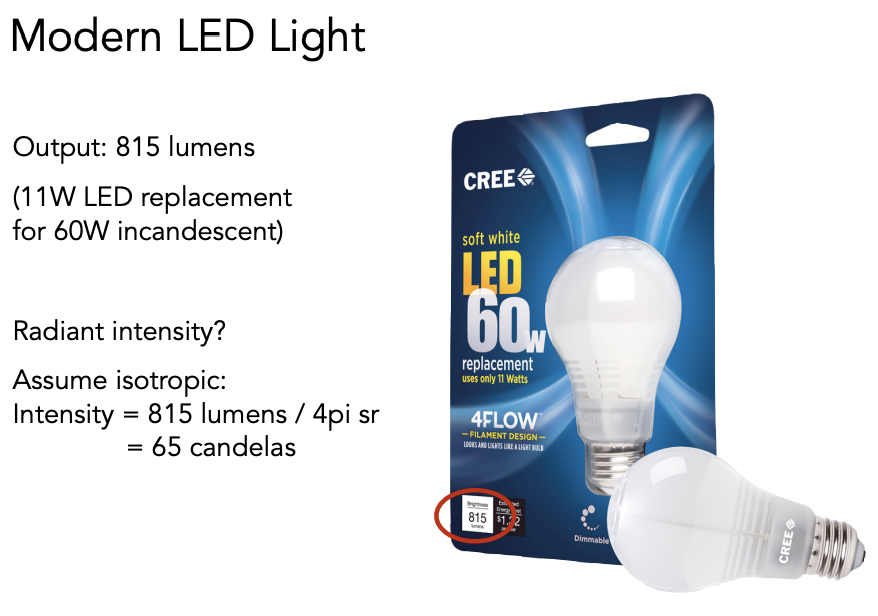
对一个点光源,radiant intensity 是单位立体角的能量,把所有方向上的单位立体角的 intensity 积分,就可以得到它的 power,反之任何一个方向的 Intensity 就是 power/4π。
小知识:现代 LED 灯上标注的瓦数不是真实的,而是对应于白炽灯的瓦数,LED 实际瓦数更低。